Exploration in Relational Worlds
Project by Tobias Lang, Marc Toussaint and Kristian Kersting
Some of our work has been published at ECML 2010 (PDF).
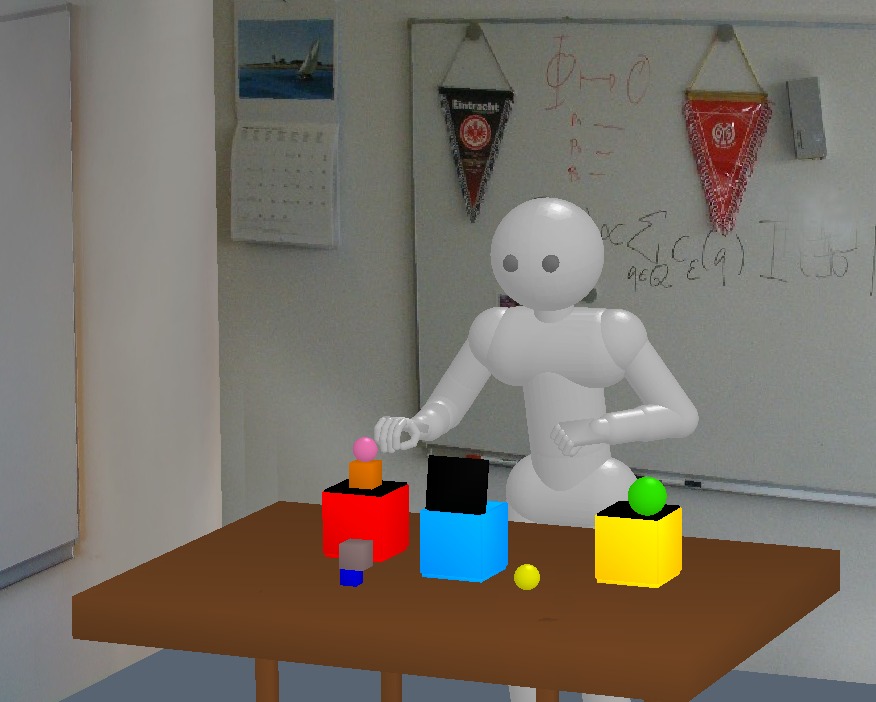
This website gives an illustration of first round runs of opt-REX (Optimistic Relational Explicit Exploit or Explore) in our robot manipulation domain using a desktop world simulator with a physics engine (ODE).
opt-REX uses three different types of behavior:
- Exploitation: plan for goal
- Planned Exploration: plan towards novel states
- Direct Exploration: explore unknown actions in current state
There are two types of action: puton(.) and grab(.). The top left in the videos presents the current action and the type of the underlying behavior.
Please note that thus far the robot is equipped with a magic finger to grasp and move objects.
Tower example
Goal: build a high tower (random order of objects)This video presents the idea of relational exploration. During the interaction with the environment, the robot learns that objects can be put on blocks, but not on balls. The robot exploits these insights in its second attempt to build a tower. The second ball is completely ignored as the robot has learned that it cannot use two balls for building a tower.
Get the Flash Player to see this player.
Boxes example
Goal: on(68, 71)71 is a cube which is contained in the red box in the beginning. 68 is one of the cubes in front of the robot lying on the table.
Get the Flash Player to see this player.
Links to Software and Source Code
